Reddit user Wugz shared the first real world test of the new “Acceleration Boost” software update rolled out by Tesla yesterday. This is what he writes:
I guess we’re calling it AWD+ now.
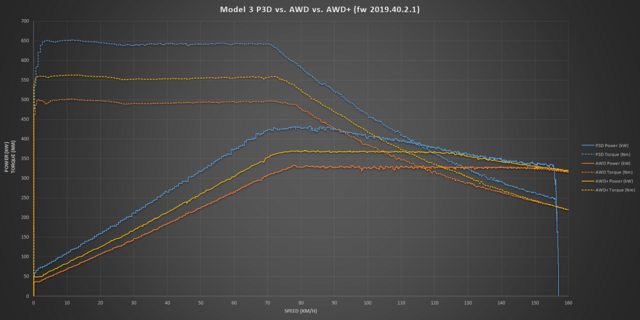
Just like my AWD and P3D tests, I sampled hi-res data from the CAN bus while flooring my Model 3 AWD+ from 0 km/h to 160 km/h after installing the Acceleration Boost upgrade. Conditions were kept as similar as possible to the previous results: Climate Off, SoC was 90-93%, pack temperature was 37-38°C, and four runs showed nearly identical results.
Compared to before the Acceleration Boost (but after the 2019.36.2 power increase):
-
Peak power increased from 332 kW (447 HP) to 370.9 kW (497 HP), an increase of 50 HP (+11.3%)
-
Peak torque increased from 501.75 Nm to 564 Nm, an increase of 62 Nm (+12.4%)
-
Front motor peak power increased from 139.5 kW to 175.5 kW (+25.8%) and peak torque increased from 185.5 Nm to 232.25 Nm (+25.2%)
-
Rear motor peak power decreased from 231 kW to 221 kW (-4.3%) while peak torque increased from 318.5 Nm to 333 Nm (+4.5%)
-
0-60 mph in 3.781s
-
0-100 km/h in 3.962s
-
0-160 km/h in 8.478s
The majority of the increase is due to increased front motor power and torque, with the rear motor actually generating slightly less power overall for a more balanced power delivery to all four wheels. This is also the first upgrade that has affected peak torque; all previous upgrades only affected peak power. The 0-160 km/h time is over a half-second quicker than AWD and over a second quicker than pre-2019.36.2 times, and I’d expect similar results in any quarter mile times.
The AWD+ almost splits the difference between AWD and P3D. Above 125 km/h both AWD+ and P3D output the same power and become essentially the same car, and above 150 km/h the AWD, AWD+ and P3D all output equal power.
All speed runs were measured from the moment speed was first detected, around the time of peak torque and around 0.19s after the accelerator pedal motion was first detected. Individual times have a +/-10ms accuracy due to CAN bus polling rates, though I left it in thousandths when averaging the 4 runs. Due to the wheel sensors not registering motion until some rotation occurs, some amount of roll-out was likely involved in the times.

{kind=link}